Rotation Matrix 4X4 - Quaternion To Rotation Matrix

The rotation matrix is easy get from the transform matrix, but be careful. Equals(matrix4x4) returns a value that indicates whether this instance and another 4x4 matrix are equal. Attempts to extract the scale, translation, and rotation components from the given scale, rotation, or translation matrix. To_4x4 ¶ return a 4x4 copy of this matrix. May 06, 2013 · note that these are really only necessary for translations, if we omitted translations from our movements we could do the motions with 3x3 rotation matrices obtained by deleting the last rows and last columns of the 4x4 matrices. Then a rotation quaternion (\(\mathbf{r}\)) is applied to rotate the camera around the object. The first translation (\(\mathbf{t}_0\)) moves the camera a certain distance away from the object so the object can fit in the view. This is an easy mistake to make. A transformation matrix can perform arbitrary linear 3d transformations (i.e. The following code generates a 3d vector (representing the centre of rotation) from the 4x4 matrix. In some practical applications, inversion can be computed using general inversion algorithms or by performing inverse operations (that have obvious geometric interpretation, like rotating.
Translation, rotation, scale, shear etc.) and perspective transformations using homogenous coordinates. When a is an invertible matrix there is a matrix a −1 that represents a transformation that undoes a since its composition with a is the identity matrix. May 06, 2013 · note that these are really only necessary for translations, if we omitted translations from our movements we could do the motions with 3x3 rotation matrices obtained by deleting the last rows and last columns of the 4x4 matrices. A transformation matrix can perform arbitrary linear 3d transformations (i.e. The theory is given here. Do not confuse the rotation matrix with the transform matrix. In this article vectors are multiplied by matrices on the vector's left. This is an easy mistake to make. The return value indicates whether the operation succeeded. The rotation matrix is easy get from the transform matrix, but be careful.
Attempts to extract the scale, translation, and rotation components from the given scale, rotation, or translation matrix.
Jul 06, 2011 · to construct the view matrix for the arcball camera, we will use two translations and a rotation. A standard 4x4 transformation matrix. In this article vectors are multiplied by matrices on the vector's left. A 3x2 transformation matrix, or a 4x4 matrix where the items m 31, m 32, m 13, m 23, m 43, m 14, m 24, m 34 are equal to 0 and m 33, m 44 are equal to 1. In some practical applications, inversion can be computed using general inversion algorithms or by performing inverse operations (that have obvious geometric interpretation, like rotating. The first translation (\(\mathbf{t}_0\)) moves the camera a certain distance away from the object so the object can fit in the view. Translation, rotation, scale, shear etc.) and perspective transformations using homogenous coordinates. A matrix that defines the mapping from the local coordinate system into the viewport coordinate system. When a is an invertible matrix there is a matrix a −1 that represents a transformation that undoes a since its composition with a is the identity matrix. This is an easy mistake to make. A transformation matrix can perform arbitrary linear 3d transformations (i.e.
When a is an invertible matrix there is a matrix a −1 that represents a transformation that undoes a since its composition with a is the identity matrix. A 3x2 transformation matrix, or a 4x4 matrix where the items m 31, m 32, m 13, m 23, m 43, m 14, m 24, m 34 are equal to 0 and m 33, m 44 are equal to 1. Jul 06, 2011 · to construct the view matrix for the arcball camera, we will use two translations and a rotation. The return value indicates whether the operation succeeded. To_euler (order, euler_compat) ¶ return an euler representation of the rotation matrix (3x3 or 4x4 matrix only).
The first translation (\(\mathbf{t}_0\)) moves the camera a certain distance away from the object so the object can fit in the view.
To_4x4 ¶ return a 4x4 copy of this matrix. Also if we use a 4×4 matrix then this can hold a translation (as explained here) and therefore can specify a rotation about a point. Attempts to extract the scale, translation, and rotation components from the given scale, rotation, or translation matrix. The theory is given here. The rotation matrix is easy get from the transform matrix, but be careful. Translation, rotation, scale, shear etc.) and perspective transformations using homogenous coordinates. The first translation (\(\mathbf{t}_0\)) moves the camera a certain distance away from the object so the object can fit in the view. Then a rotation quaternion (\(\mathbf{r}\)) is applied to rotate the camera around the object. A transformation matrix can perform arbitrary linear 3d transformations (i.e. May 06, 2021 · the third form of placement describes the object's position and orientation with a 4x4 affine transformation matrix (affine transformation). A matrix that defines the mapping from the local coordinate system into the viewport coordinate system.
The return value indicates whether the operation succeeded. When a is an invertible matrix there is a matrix a −1 that represents a transformation that undoes a since its composition with a is the identity matrix. May 06, 2021 · the third form of placement describes the object's position and orientation with a 4x4 affine transformation matrix (affine transformation). A matrix that defines the mapping from the local coordinate system into the viewport coordinate system. A 3x2 transformation matrix, or a 4x4 matrix where the items m 31, m 32, m 13, m 23, m 43, m 14, m 24, m 34 are equal to 0 and m 33, m 44 are equal to 1. The rotation matrix is easy get from the transform matrix, but be careful. This is an easy mistake to make. Then a rotation quaternion (\(\mathbf{r}\)) is applied to rotate the camera around the object.

The theory is given here.
Attempts to extract the scale, translation, and rotation components from the given scale, rotation, or translation matrix. The return value indicates whether the operation succeeded. The following code generates a 3d vector (representing the centre of rotation) from the 4x4 matrix. A standard 4x4 transformation matrix. A transformation matrix can perform arbitrary linear 3d transformations (i.e. When a is an invertible matrix there is a matrix a −1 that represents a transformation that undoes a since its composition with a is the identity matrix. Jul 06, 2011 · to construct the view matrix for the arcball camera, we will use two translations and a rotation. In this article vectors are multiplied by matrices on the vector's left. Equals(matrix4x4) returns a value that indicates whether this instance and another 4x4 matrix are equal. Then a rotation quaternion (\(\mathbf{r}\)) is applied to rotate the camera around the object.
Equals(matrix4x4) returns a value that indicates whether this instance and another 4x4 matrix are equal matrix 4x4. Also if we use a 4×4 matrix then this can hold a translation (as explained here) and therefore can specify a rotation about a point.

The rotation matrix is easy get from the transform matrix, but be careful.

The first translation (\(\mathbf{t}_0\)) moves the camera a certain distance away from the object so the object can fit in the view.

The theory is given here.

A 3x2 transformation matrix, or a 4x4 matrix where the items m 31, m 32, m 13, m 23, m 43, m 14, m 24, m 34 are equal to 0 and m 33, m 44 are equal to 1.

When a is an invertible matrix there is a matrix a −1 that represents a transformation that undoes a since its composition with a is the identity matrix.

Jul 06, 2011 · to construct the view matrix for the arcball camera, we will use two translations and a rotation.

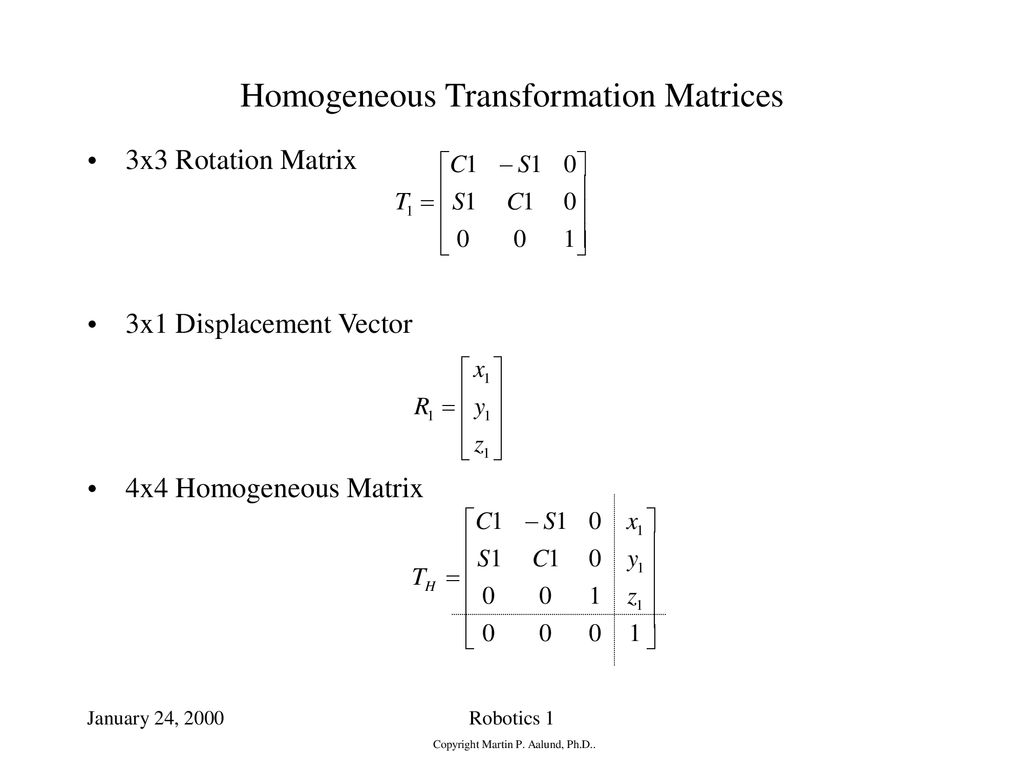
Matrix = ((r11,r12,r13,t1), (r21,r22,r23,t2), (r31,r32,r33,t3), (0,0,0,1)) , with rij specifying rotation and ti specifying translation.

Equals(matrix4x4) returns a value that indicates whether this instance and another 4x4 matrix are equal.

The theory is given here.
 and therefore can specify a rotation about a point.")
The theory is given here.
 and perspective transformations using homogenous coordinates.")
This is an easy mistake to make.

This is an easy mistake to make.
 returns a value that indicates whether this instance and another 4x4 matrix are equal.")
Also if we use a 4×4 matrix then this can hold a translation (as explained here) and therefore can specify a rotation about a point.

When we talk about combining rotation matrices, be sure you do not include the last column of the transform matrix which includes the translation information.
) moves the camera a certain distance away from the object so the object can fit in the view.")
The following code generates a 3d vector (representing the centre of rotation) from the 4x4 matrix.

The following code generates a 3d vector (representing the centre of rotation) from the 4x4 matrix.
 and therefore can specify a rotation about a point.")
Attempts to extract the scale, translation, and rotation components from the given scale, rotation, or translation matrix.

May 06, 2013 · note that these are really only necessary for translations, if we omitted translations from our movements we could do the motions with 3x3 rotation matrices obtained by deleting the last rows and last columns of the 4x4 matrices.
Translation, rotation, scale, shear etc.) and perspective transformations using homogenous coordinates.

May 06, 2021 · the third form of placement describes the object's position and orientation with a 4x4 affine transformation matrix (affine transformation).

The theory is given here.

The theory is given here.

Then a rotation quaternion (\(\mathbf{r}\)) is applied to rotate the camera around the object.

The following code generates a 3d vector (representing the centre of rotation) from the 4x4 matrix.

This is an easy mistake to make.

The return value indicates whether the operation succeeded.

Jul 06, 2011 · to construct the view matrix for the arcball camera, we will use two translations and a rotation.
) is applied to rotate the camera around the object.")
May 06, 2021 · the third form of placement describes the object's position and orientation with a 4x4 affine transformation matrix (affine transformation).

Equals(matrix4x4) returns a value that indicates whether this instance and another 4x4 matrix are equal.

Posting Komentar untuk "Rotation Matrix 4X4 - Quaternion To Rotation Matrix"